Contents
clear
close all
clc
options=optimset('Display','off','LargeScale','off');
Define geometric constant parameters and time vector
Oao=(45*pi)/180;
L2=1;
L3=2.3;
L4=1.8;
L1=2;
L5=3;
B=(30*pi)/180;
W=(30*pi)/180;
Define an initial guess for vector q
xo= [1,1,3,6,5,1,9,2,6,8,3]';
time=0:0.1:12;
Use a 'for' structure for computing kinematics
for i=1:length(time)
if i>1
xo=x;
end
t=time(i);
[x] = fsolve('pos',xo,options,L1,L2,L3,L4,L5,B,W,Oao,t);
alm_x(i,:)=x;
xa=x(1);
ya=x(2);
Oa=x(3);
xb=x(4);
yb=x(5);
Ob=x(6);
xc=x(7);
yc=x(8);
Oc=x(9);
xd=x(10);
yd=x(11);
ve=[-(L2*W*sin(Oa))/2;
(L2*W*cos(Oa))/2;
W;
(L2*W*(cos(Oa)*sin(Ob)*sin(Oc) - 2*cos(Ob)*sin(Oa)*sin(Oc) + cos(Oc)*sin(Oa)*sin(Ob)))/(2*(cos(Ob)*sin(Oc) - cos(Oc)*sin(Ob)));
(L2*W*(cos(Oa)*cos(Ob)*sin(Oc) - 2*cos(Oa)*cos(Oc)*sin(Ob) + cos(Ob)*cos(Oc)*sin(Oa)))/(2*(cos(Ob)*sin(Oc) - cos(Oc)*sin(Ob)));
-(L2*W*(cos(Oa)*sin(Oc) - cos(Oc)*sin(Oa)))/(L3*(cos(Ob)*sin(Oc) - cos(Oc)*sin(Ob)));
(L2*W*(cos(Oa)*sin(Ob)*sin(Oc) - cos(Ob)*sin(Oa)*sin(Oc)))/(2*(cos(Ob)*sin(Oc) - cos(Oc)*sin(Ob)));
-(L2*W*(cos(Oa)*cos(Oc)*sin(Ob) - cos(Ob)*cos(Oc)*sin(Oa)))/(2*(cos(Ob)*sin(Oc) - cos(Oc)*sin(Ob)));
(L2*W*(cos(Oa)*sin(Ob) - cos(Ob)*sin(Oa)))/(L4*(cos(Ob)*sin(Oc) - cos(Oc)*sin(Ob)));
(L2*W*(L5*sin(B + Ob)*cos(Oa)*sin(Oc) - L5*sin(B + Ob)*cos(Oc)*sin(Oa) - 2*L3*cos(Ob)*sin(Oa)*sin(Oc) + 2*L3*cos(Oc)*sin(Oa)*sin(Ob)))/(2*L3*(cos(Ob)*sin(Oc) - cos(Oc)*sin(Ob)));
-(L2*W*(L5*cos(B + Ob)*cos(Oa)*sin(Oc) - L5*cos(B + Ob)*cos(Oc)*sin(Oa) - 2*L3*cos(Oa)*cos(Ob)*sin(Oc) + 2*L3*cos(Oa)*cos(Oc)*sin(Ob)))/(2*L3*(cos(Ob)*sin(Oc) - cos(Oc)*sin(Ob)))];
alm_ve(:,i)=ve;
xap=ve(1);
yap=ve(2);
Oap=ve(3);
xbp=ve(4);
ybp=ve(5);
Obp=ve(6);
xcp=ve(7);
ycp=ve(8);
Ocp=ve(9);
xdp=ve(10);
ydp=ve(11);
ac= [(L2*Oap^2*cos(Oa))/2;
(L2*Oap^2*sin(Oa))/2;
0;
(L3*Obp^2*cos(Ob)^2*sin(Oc) + L4*Ocp^2*cos(Oc)^2*sin(Ob) + L3*Obp^2*sin(Ob)^2*sin(Oc) + L4*Ocp^2*sin(Ob)*sin(Oc)^2 + 2*L2*Oap^2*cos(Oa)*cos(Ob)*sin(Oc) - L2*Oap^2*cos(Oa)*cos(Oc)*sin(Ob) + L2*Oap^2*sin(Oa)*sin(Ob)*sin(Oc))/(2*(cos(Ob)*sin(Oc) - cos(Oc)*sin(Ob)));
-(L3*Obp^2*cos(Ob)^2*cos(Oc) + L4*Ocp^2*cos(Ob)*cos(Oc)^2 + L3*Obp^2*cos(Oc)*sin(Ob)^2 + L4*Ocp^2*cos(Ob)*sin(Oc)^2 + L2*Oap^2*cos(Oa)*cos(Ob)*cos(Oc) - L2*Oap^2*cos(Ob)*sin(Oa)*sin(Oc) + 2*L2*Oap^2*cos(Oc)*sin(Oa)*sin(Ob))/(2*(cos(Ob)*sin(Oc) - cos(Oc)*sin(Ob)));
-(L2*cos(Oa)*Oap^2*cos(Oc) + L2*sin(Oa)*Oap^2*sin(Oc) + L3*cos(Ob)*Obp^2*cos(Oc) + L3*sin(Ob)*Obp^2*sin(Oc) + L4*Ocp^2*cos(Oc)^2 + L4*Ocp^2*sin(Oc)^2)/(L3*(cos(Ob)*sin(Oc) - cos(Oc)*sin(Ob)));
(L2*cos(Oa)*Oap^2*cos(Ob)*sin(Oc) + L2*sin(Oa)*Oap^2*sin(Ob)*sin(Oc) + L3*Obp^2*cos(Ob)^2*sin(Oc) + L3*Obp^2*sin(Ob)^2*sin(Oc) + L4*Ocp^2*cos(Oc)^2*sin(Ob) + L4*Ocp^2*sin(Ob)*sin(Oc)^2)/(2*(cos(Ob)*sin(Oc) - cos(Oc)*sin(Ob)));
-(L2*cos(Oa)*Oap^2*cos(Ob)*cos(Oc) + L2*sin(Oa)*Oap^2*cos(Oc)*sin(Ob) + L3*Obp^2*cos(Ob)^2*cos(Oc) + L3*Obp^2*cos(Oc)*sin(Ob)^2 + L4*Ocp^2*cos(Ob)*cos(Oc)^2 + L4*Ocp^2*cos(Ob)*sin(Oc)^2)/(2*(cos(Ob)*sin(Oc) - cos(Oc)*sin(Ob)));
(L2*cos(Oa)*Oap^2*cos(Ob) + L2*sin(Oa)*Oap^2*sin(Ob) + L3*Obp^2*cos(Ob)^2 + L3*Obp^2*sin(Ob)^2 + L4*cos(Oc)*Ocp^2*cos(Ob) + L4*sin(Oc)*Ocp^2*sin(Ob))/(L4*(cos(Ob)*sin(Oc) - cos(Oc)*sin(Ob)));
(L4*L5*Ocp^2*sin(B + Ob)*cos(Oc)^2 + L4*L5*Ocp^2*sin(B + Ob)*sin(Oc)^2 + L2*L5*Oap^2*sin(B + Ob)*cos(Oa)*cos(Oc) + L3*L5*Obp^2*cos(B + Ob)*cos(Ob)*sin(Oc) - L3*L5*Obp^2*cos(B + Ob)*cos(Oc)*sin(Ob) + L3*L5*Obp^2*sin(B + Ob)*cos(Ob)*cos(Oc) + L2*L5*Oap^2*sin(B + Ob)*sin(Oa)*sin(Oc) + L3*L5*Obp^2*sin(B + Ob)*sin(Ob)*sin(Oc) + 2*L2*L3*Oap^2*cos(Oa)*cos(Ob)*sin(Oc) - 2*L2*L3*Oap^2*cos(Oa)*cos(Oc)*sin(Ob))/(2*L3*(cos(Ob)*sin(Oc) - cos(Oc)*sin(Ob)));
-(L4*L5*Ocp^2*cos(B + Ob)*cos(Oc)^2 + L4*L5*Ocp^2*cos(B + Ob)*sin(Oc)^2 + L2*L5*Oap^2*cos(B + Ob)*cos(Oa)*cos(Oc) + L3*L5*Obp^2*cos(B + Ob)*cos(Ob)*cos(Oc) + L2*L5*Oap^2*cos(B + Ob)*sin(Oa)*sin(Oc) + L3*L5*Obp^2*cos(B + Ob)*sin(Ob)*sin(Oc) - L3*L5*Obp^2*sin(B + Ob)*cos(Ob)*sin(Oc) + L3*L5*Obp^2*sin(B + Ob)*cos(Oc)*sin(Ob) - 2*L2*L3*Oap^2*cos(Ob)*sin(Oa)*sin(Oc) + 2*L2*L3*Oap^2*cos(Oc)*sin(Oa)*sin(Ob))/(2*L3*(cos(Ob)*sin(Oc) - cos(Oc)*sin(Ob)))];
alm_ac(:,i)=ac;
end
Start another 'for' for plotting
for i=1:length(time)
xa=alm_x(i,1);
ya=alm_x(i,2);
Oa=alm_x(i,3);
xb=alm_x(i,4);
yb=alm_x(i,5);
Ob=alm_x(i,6);
xc=alm_x(i,7);
yc=alm_x(i,8);
Oc=alm_x(i,9);
xd=alm_x(i,10);
yd=alm_x(i,11);
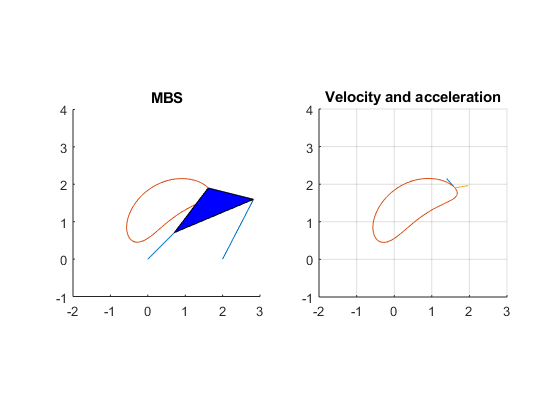
subplot(121)
cla
title('MBS')
hold on
axis equal
axis([-2 3 -1 4])
P_Or=[0,0];
P_A=[cos(Oa)*L2,sin(Oa)*L2];
P_B=[cos(Ob)*L3+cos(Oa)*L2,sin(Ob)*L3+sin(Oa)*L2];
P_C=[P_B(1)-cos(Oc-pi)*L4,P_B(2)-sin(Oc-pi)*L4];
P_D=[xd,yd];
puntos=[P_Or',P_A',P_B',P_C'];
plot(puntos(1,:),puntos(2,:));
al_xd(i)=xd;
al_yd(i)=yd;
plot(al_xd,al_yd);
puntos_fill=[P_A',P_D',P_B'];
fill(puntos_fill(1,:),puntos_fill(2,:),'b');
hold off
pause(0.0001)
subplot(122)
cla
axis equal
axis([-2 3 -1 4])
title('Velocity and acceleration')
hold on
grid on
xdv=alm_ve(10,i);
ydv=alm_ve(11,i);
quiver(xd,yd,xdv,ydv);
plot(al_xd,al_yd);
xda=alm_ac(10,i);
yda=alm_ac(11,i);
quiver(xd,yd,xda,yda);
end
function F = pos(X,L1,L2,L3,L4,L5,B,W,Oao,t)
xa=X(1);
ya=X(2);
Oa=X(3);
xb=X(4);
yb=X(5);
Ob=X(6);
xc=X(7);
yc=X(8);
Oc=X(9);
xd=X(10);
yd=X(11);
F = [xa-(L2*cos(Oa))/2;
ya-(L2*sin(Oa))/2;
xb-xa-(L2*cos(Oa))/2-(L3*cos(Ob))/2;
yb-ya-(L2*sin(Oa))/2-(L3*sin(Ob))/2;
xc-xb-(L3*cos(Ob))/2-(L4*cos(Oc))/2;
yc-yb-(L3*sin(Ob))/2-(L4*sin(Oc))/2;
L1-xc-(L4*cos(Oc))/2;
-yc-(L4*sin(Oc))/2;
xd-xa-(L5*cos(B+Ob))/2-(L2*cos(Oa))/2;
yd-ya-(L5*sin(B+Ob))/2-(L2*sin(Oa))/2;
Oa-Oao-t*W];
end